Commands an interpolated helical movement on an axis group from the current position of the tool center point. The end point and the auxiliary point (the meaning of both points depends on the CircMode mode you select) are defined in the specified coordinate system relative to the starting point.
Namespace: IntervalZero.KINGSTAR.Base.Class
Assembly: IntervalZero.KINGSTAR.Base.Class (in IntervalZero.KINGSTAR.Base.dll) Version: 4.4.0.0
Syntax
IMoveHelicalCommand MoveHelicalRelative(
McCircMode circMode,
double[] auxPoint,
double[] endPoint,
McCircPathChoice pathChoice,
double depth,
double pitch,
double velocity,
double acceleration,
double deceleration,
double jerk,
McCoordSystem coordSystem,
McBufferMode bufferMode,
McTransitionMode transitionMode,
double[] transitionParameter
)Function MoveHelicalRelative(
circMode As McCircMode,
auxPoint As Double(),
endPoint As Double(),
pathChoice As McCircPathChoice,
depth As Double,
pitch As Double,
velocity As Double,
acceleration As Double,
deceleration As Double,
jerk As Double,
coordSystem As McCoordSystem,
bufferMode As McBufferMode,
transitionMode As McTransitionMode,
transitionParameter As Double()
)As IMoveHelicalCommandParameters
circMode
Type: McCircMode
Specifies the meaning of the input signal AuxPoint.
auxPoint
Type: double[]
The array of positions for each dimension in the specified coordinate system. The maximum size is 64. These positions are defined relatively to the positions of the starting point.
endPoint
Type: double[]
The array of positions for each dimension in the specified coordinate system. The maximum size is 64. These positions are defined relatively to the positions of the starting point.
pathChoice
Type: McCircPathChoice
The choice of path.
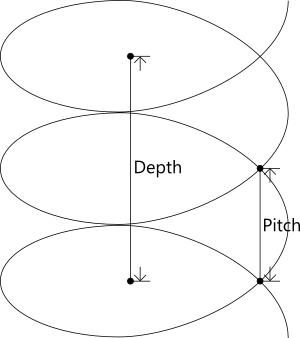
depth
Type: double
The height of the helix.
pitch
Type: double
The height of one full helix turn.
velocity
Type: double
The maximum velocity of the path for the coordinate system in which the path is defined. Always positive. Not necessarily reached. [unit/second]
acceleration
Type: double
The maximum acceleration. Always positive. Not necessarily reached. The unit is determined by McProfileType. [unit/second2] or [second]
deceleration
Type: double
The maximum deceleration. Always positive. Not necessarily reached. The unit is determined by McProfileType. [unit/second2] or [second]
jerk
Type: double
The maximum jerk. Always positive. Not necessarily reached. The unit is determined by McProfileType. [unit/second3] or [second]
coordSystem
Type: McCoordSystem
A coordinate system.
bufferMode
Type: McBufferMode
Defines the chronological sequence of a method.
transitionMode
Type: McTransitionMode
Inserts a transition curve.
transitionParameter
Type: double[]
The additional parameter for the transition mode. If TransitionMode is set to mcNone, this parameter has no effect.
Return value
Type: IMoveHelicalCommand
Returns a state of a helical move.
Remarks
- For more information about how absolute, relative, and additive work, see Motion.
- For more information about how the axes move in the McCircMode mode, see McCircMode.
- The Depth and Pitch parameters are illustrated in the following figure.
- The velocity of interpolation is tangential velocity.
| Clockwise path | Counterclockwise path |
|---|---|
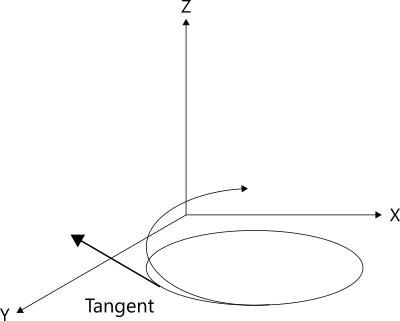
|
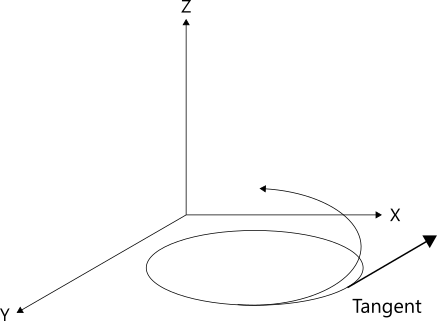
|
See also